ETH Zurich Spin‑out Unveils Helios, a Four‑Armed Robot for Space Work
Why It Matters
Helios tackles a persistent bottleneck in human spaceflight: the high cost and limited availability of crew time for routine tasks. By automating cargo handling and equipment maintenance, the robot could lower mission operating expenses and enable longer, more ambitious missions without proportionally increasing crew size. Its design also demonstrates a shift toward hardware that embraces microgravity physics rather than adapting Earth‑centric concepts, a trend likely to influence future spacecraft interiors and the broader space‑hardware supply chain. Beyond cost savings, Helios could improve safety. A robot that can securely brace itself while manipulating objects reduces the risk of floating debris striking sensitive equipment or crew members. As commercial orbital habitats proliferate, such safety‑first automation will become a prerequisite for sustainable, long‑duration human presence in space.
Key Takeaways
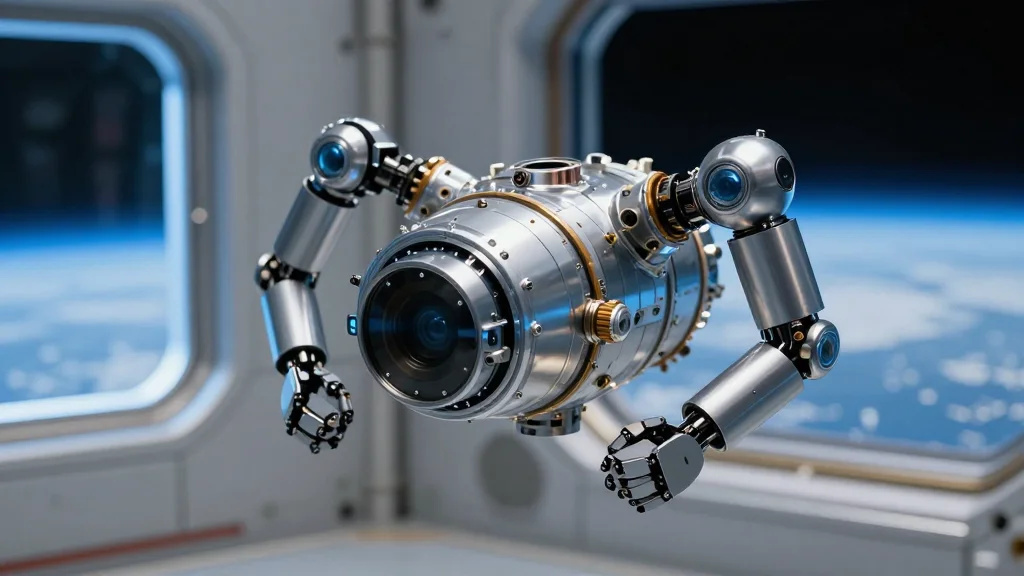
- •Orbit Robotics unveiled Helios, a four‑arm robot built for microgravity environments.
- •Two arms anchor the robot while the other two manipulate tools, addressing the 35% of ISS crew time spent on maintenance.
- •Tendon‑driven actuation and rolling‑contact elbow joints reduce limb inertia and improve stability.
- •Maintenance costs on the ISS are estimated at $140,000 per astronaut‑hour, a cost Helios aims to cut.
- •A flight‑qualified demonstration is planned for late 2026, targeting contracts with both government and commercial space operators.
Pulse Analysis
Helios marks a strategic pivot in space robotics from Earth‑centric locomotion to microgravity‑optimized manipulation. The tendon‑driven approach mirrors trends in terrestrial robotics where cable‑actuated limbs lower distal mass, but its application in orbit is novel. By moving the heavy motors close to the robot’s torso, Helios minimizes the moment of inertia at the arm tips, a critical factor when even small forces can cause uncontrolled drift in a weightless environment. This engineering choice not only improves precision but also reduces the power budget, a decisive advantage for battery‑limited spacecraft.
The market impact could be profound. As NASA, ESA and private firms like Axiom Space accelerate the development of commercial habitats, the demand for reliable, low‑mass robotic assistants will rise. Helios’ dual‑arm workflow offers a modular template: operators could swap out tool‑specific end‑effectors without redesigning the entire platform. Competitors that continue to invest in legged or wheeled designs may find themselves at a disadvantage, especially if they cannot match Helios’ payload‑handling efficiency and safety profile.
Looking ahead, Helios’ success will hinge on its ability to integrate with existing spacecraft systems and to demonstrate robust teleoperation or autonomous capabilities under real‑world conditions. If the late‑2026 flight test validates its control algorithms and safety mechanisms, the robot could become a baseline component for future orbital infrastructure, much like the Canadarm did for the shuttle era. This would not only reshape the economics of crewed missions but also accelerate the broader commercialization of low‑Earth orbit, setting the stage for a new generation of hardware designed from the ground up for the unique physics of space.
ETH Zurich Spin‑out Unveils Helios, a Four‑Armed Robot for Space Work
Comments
Want to join the conversation?
Loading comments...