Dead Time Compensation in PID Tuning
Key Takeaways
- •Dead time causes delayed feedback, leading to overshoot and oscillations
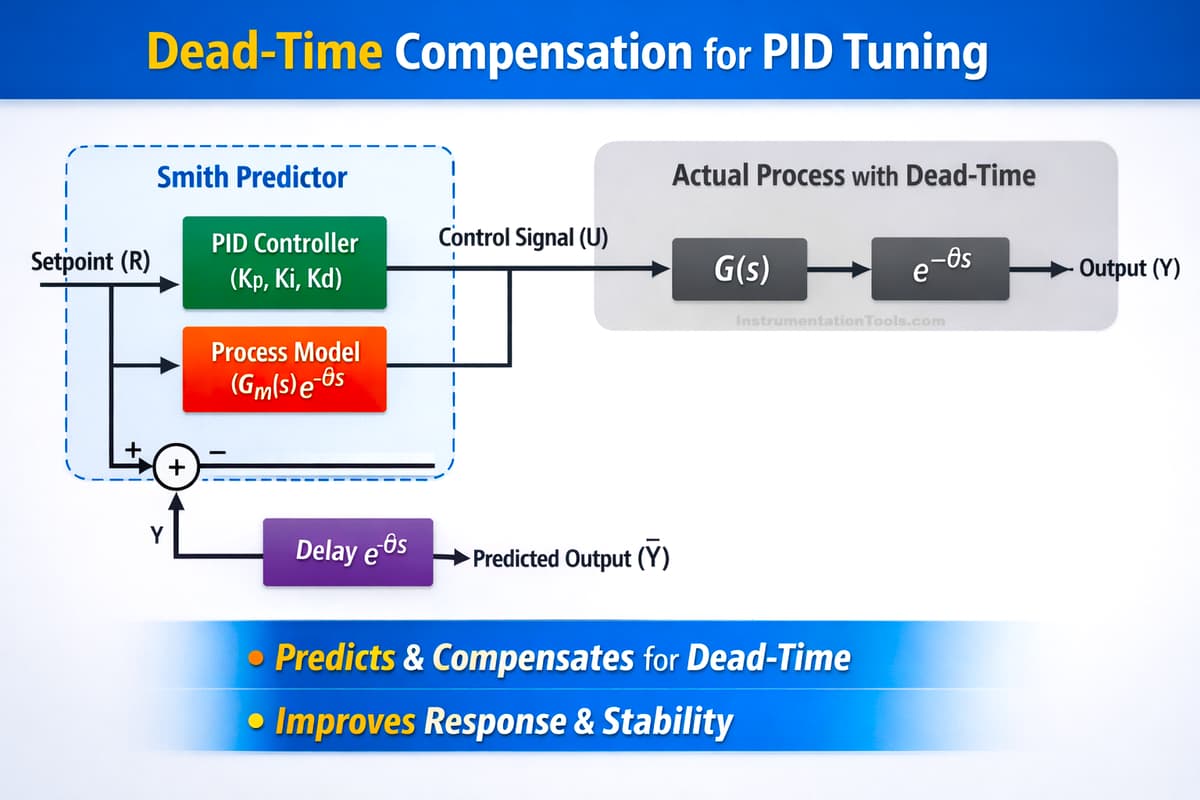
- •Smith Predictor replaces delayed sensor data with model predictions
- •Implementation needs a process model, FIFO buffer, and correction logic
- •Major PLC vendors offer add‑on Smith Predictor blocks for advanced control
Pulse Analysis
In many industrial processes, the sensor that reports the controlled variable lags the actual plant response by seconds or even minutes. This dead time creates a mismatch between the controller’s output and the real state, often driving the actuator to extreme positions before the loop can react. The result is a classic “hunt‑and‑peck” behavior that wastes energy, shortens equipment life, and can jeopardize safety. Understanding how dead time skews the feedback loop is the first step toward more reliable automation.
The Smith Predictor offers a model‑based workaround. By embedding a mathematical replica of the plant inside the controller, the algorithm forecasts the future process variable and feeds that prediction to the PID as a temporary feedback signal. Simultaneously, a FIFO buffer holds real sensor readings for the duration of the dead time. When the delayed measurement arrives, it is compared with the stored prediction, and any discrepancy is used to adjust the internal model. This continuous correction lets the controller act on “future” data while staying anchored to reality, dramatically reducing overshoot and eliminating sustained oscillations.
Adoption of dead‑time compensation has moved from niche research labs to mainstream DCS and high‑end PLC packages. Vendors such as ABB, Emerson, Siemens, and Honeywell ship pre‑configured Smith Predictor blocks, while platforms like Schneider EcoStruxure and Rockwell PlantPAx provide add‑on libraries. For standard PLCs, engineers must code the model, buffer, and correction loop manually, which can increase development time and CPU load. As industries push toward tighter tolerances and greener operations, the ability to predict and correct for dead time will become a competitive differentiator, prompting broader integration of model‑based control across the automation stack.
Dead Time Compensation in PID Tuning
Comments
Want to join the conversation?