Real-Life Transformer?! Unitree’s World-First Mass-Produced Piloted Mech GD01 ($650K)
Chinese robotics firm Unitree (Unit Train Robotics) unveiled the GD01, a mass‑produced, piloted transforming mech that can carry a human operator and shift between bipedal and quadrupedal configurations. The GD01 is priced from $650,000 (approximately 3.9 million RMB) and weighs about 500 kg with a rider. In demonstrations, the founder climbed inside, showing stable locomotion in both upright and four‑legged modes, and the machine can transition by leaning backward. The company highlighted the mech’s versatility, citing potential civilian transportation applications and referencing its earlier robot performances at China’s Spring Festival gala as proof of rapid development. If the GD01 reaches broader markets, it could create a new niche for high‑end personal mobility, spur competition in the emerging piloted‑robot sector, and accelerate adoption of transformable robotic platforms beyond industrial use.
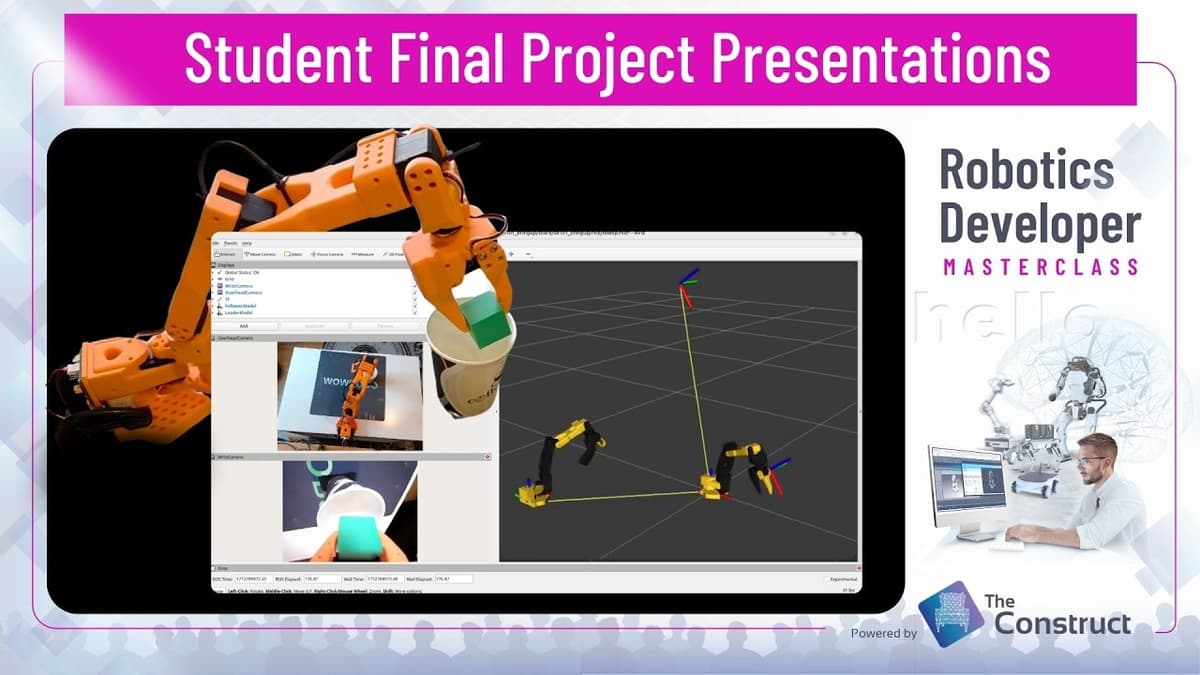
Students Final Project Presentation - Robotics Developer Masterclass
The video showcases Matias Rosas’s final project for the Robotics Developer Masterclass: an autonomous coffee‑cup dispenser built around a Universal Robotics UR3 arm, a static tray holder, and a web‑based control interface. Drawing on his data‑science and mechatronics background, he created a...

From Simulation to Real Humanoid Robot in 3 Days
The Humanoid Robot Reinforcement Learning Bootcamp offers engineers a three‑day, hands‑on program to develop, validate, and deploy humanoid control policies. Participants start by training policies in simulation, then test them across multiple simulators before transferring the algorithms to real‑world humanoid...

Humanoid Teleoperation Explained | How It Works & Why It’s Essential for Robot Training
The video explains teleoperation—real‑time control of humanoid robots by mirroring a human operator’s movements. Using a VR headset, hand controllers and ankle trackers, the operator’s pose is captured and sent to a robot such as the Unitri G1, which reproduces...
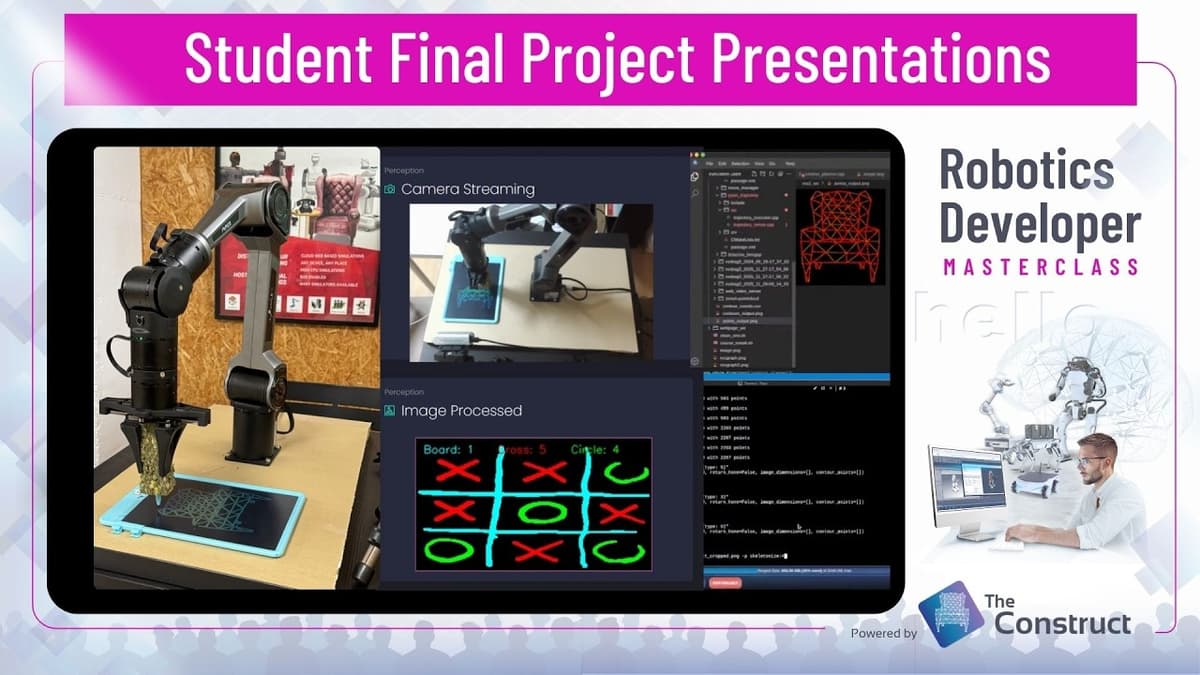
Students Final Project Presentation - Robotics Developer Masterclass
The final project presentation of the Robotics Developer Masterclass showcased Aaron Emer’s "tic‑tac‑toe bot," a robotic arm that plays tic‑tac‑toe against a human opponent using computer vision and motion planning. The system combines the ROS framework, OpenCV for perception, MoveIt...