Tesseract & ROS-I Developer Monthly Meeting Revisit
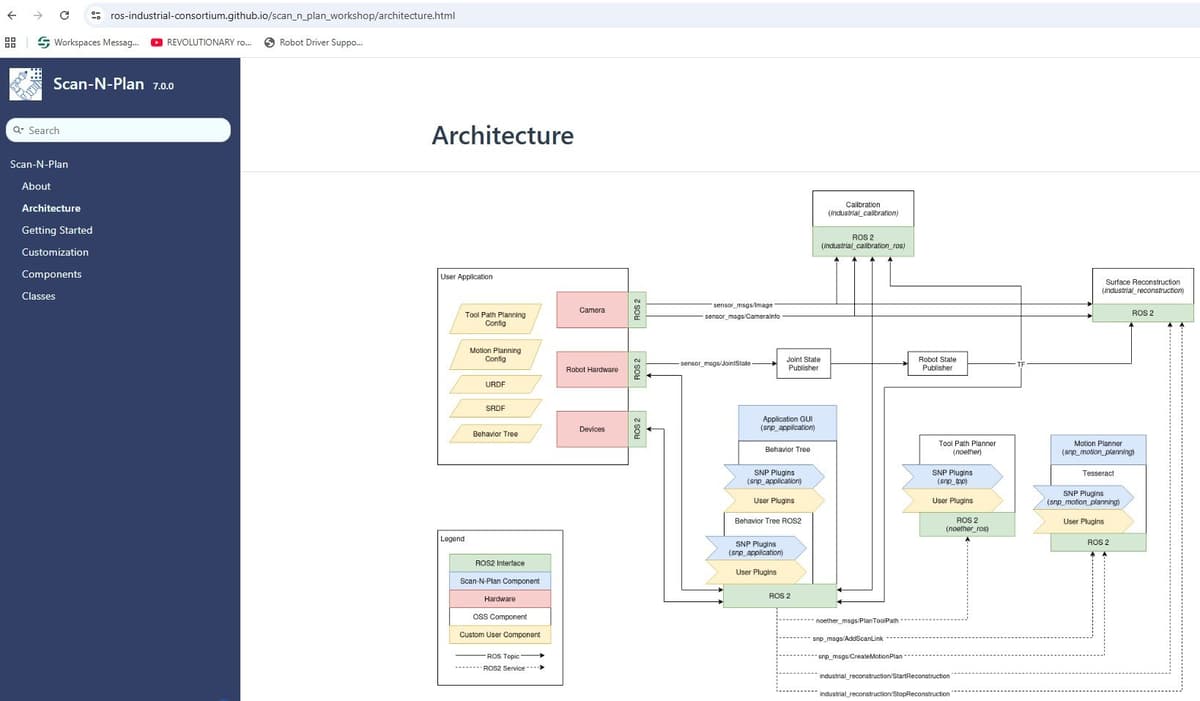
The second‑quarter ROS‑Industrial (ROS‑I) developer meeting, led by Matt Robinson, unveiled new documentation for the Scan and Plan Workshop and Noether repositories, complete with updated architecture diagrams. Michael highlighted a shift from Swig to NanoBind for Tesseract’s Python bindings and announced a repository-wide upgrade to Ubuntu 20.04 LTS and QT6. The Tesseract monthly check‑in focused on integrating OMPL 2.0’s VAMP SIMD‑accelerated planner and reported a 20‑30% speed gain from the Cole continuous collision checker. Upcoming events include a July training session and an open‑source meetup at Automate 2026 in Chicago.

PLCnext ROS Bridge: Enabling Hardware Interoperability Between Industrial PLCs and ROS
The PLCnext ROS Bridge introduces a Docker‑based ROS node that directly links the PLCnext Global Data Space with ROS topics and services, enabling bidirectional data exchange between industrial PLCs and robotic software. It leverages an Interface Description File to auto‑generate...