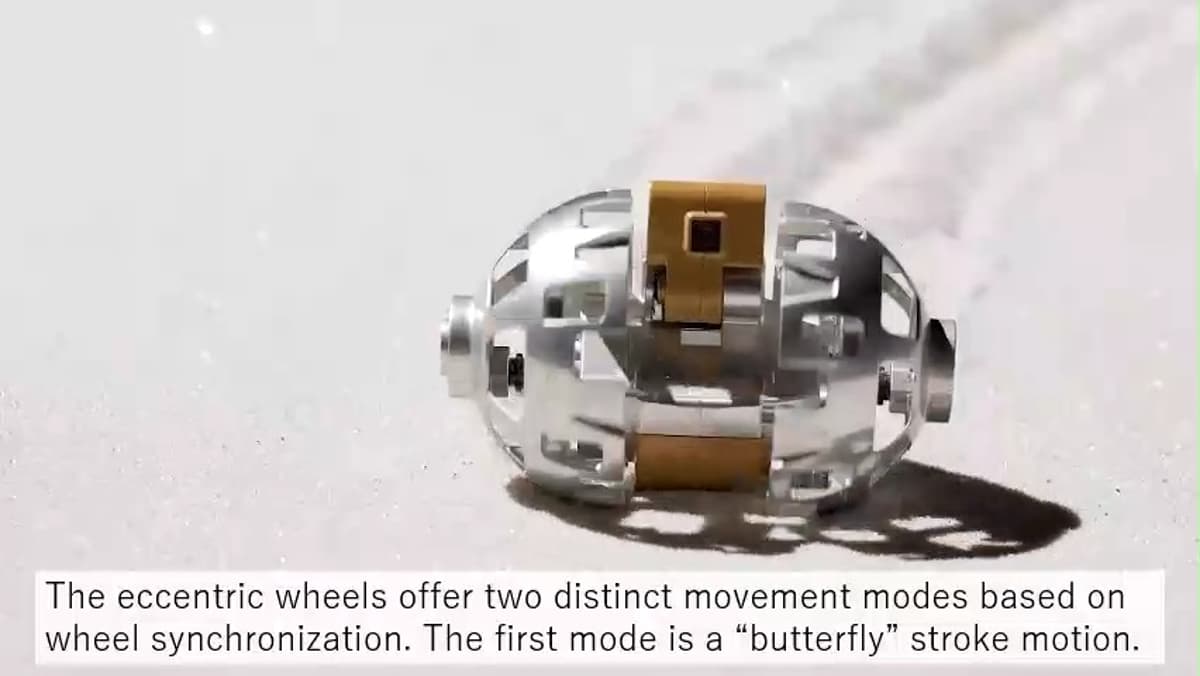
Miniature Spherical Rover Proves Small Robots’ Lunar Potential
The Japanese lunar lander SLIM successfully deployed a compact spherical robot that transformed into a wheeled rover and explored the lunar surface, highlighting the promise of small-scale robots for space exploration. Learn more in Science #Robotics: https://t.co/0CiYXLTVZt https://t.co/F6B9ZUiVnn
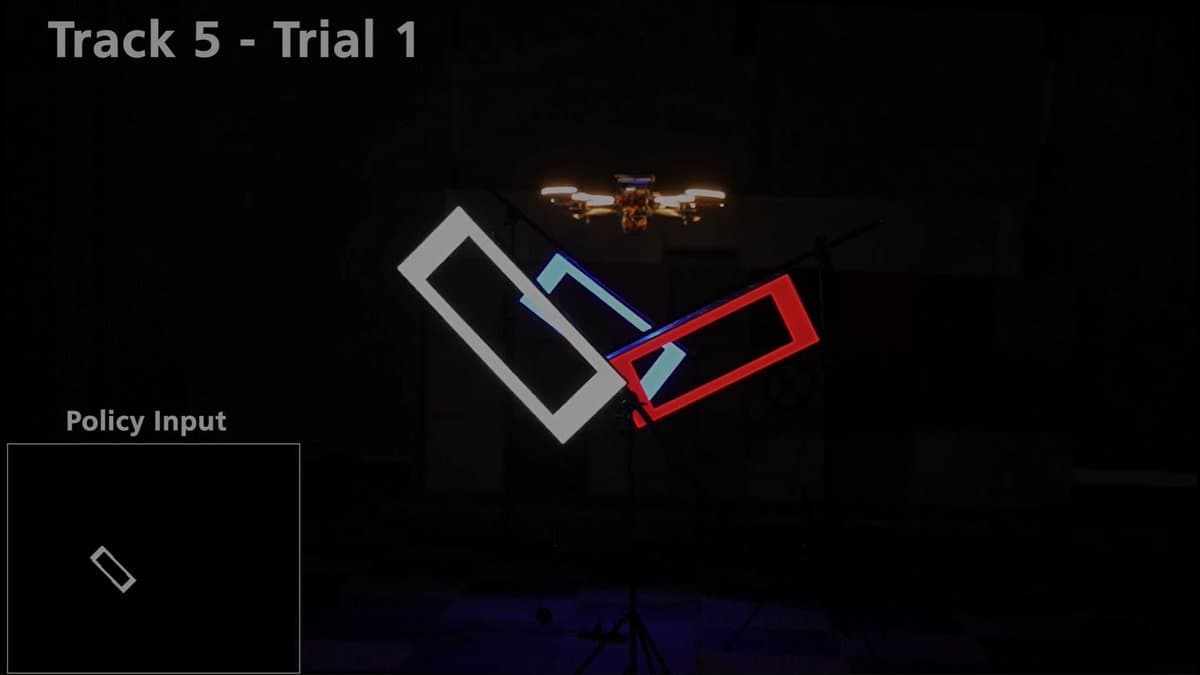
New Framework Guides Quadrotor Through Tight, Moving Gaps
A new framework enables a quadrotor to fly through a series of narrow windows, moving targets, and gaps of different shapes. Learn more in Science #Robotics: https://t.co/GV2efgnq5q https://t.co/qRsj0PatJW

Mini Transformable Rover Autonomously Images Moon's SLIM Lander
A new Science #Robotics study describes how a centimeter-scale transformable #rover navigated the #Moon’s surface autonomously and captured images of the SLIM lander and its surroundings. @JAXA_en https://t.co/0CiYXLTVZt https://t.co/uGuCaTedmp

Autonomous Robot Maps Reef Biodiversity, Tracks Shrimp and Barracuda
A new Science #Robotics study highlights an autonomous approach that can characterize coral reef #biodiversity, enabling an underwater robot to home in on snapping shrimp or follow a barracuda through #JoelsShoal. https://t.co/mNiv2IQkAf https://t.co/l1AYNtyl1Z

Shift Focus: When, Where, and for Whom Robots Are Acceptable
A new Focus argues for “a recalibration from considering whether virtually represented robots are valid to when, where, and for whom they are acceptable,” during research on human-robot interactions. Learn more in Science #Robotics: https://t.co/bFVwuztEau https://t.co/jlZeXgRa7z
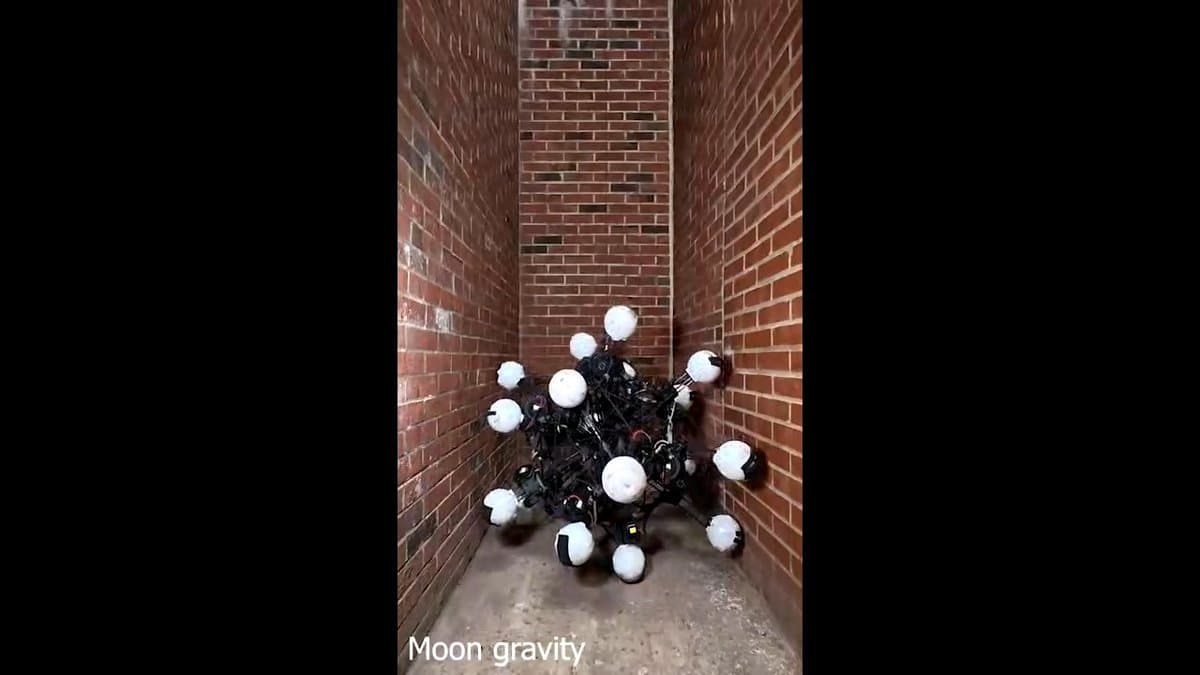
Argus Spherical Robot Traverses Walls and Rough Terrain
Argus, a spherical robot with 20 symmetric legs and cameras, can monitor and navigate diverse terrains, climb walls, and move while carrying payloads. @Boyuan__Chen Learn more in Science #Robotics: https://t.co/zlYlfRxrDG https://t.co/I0VTyEygIC
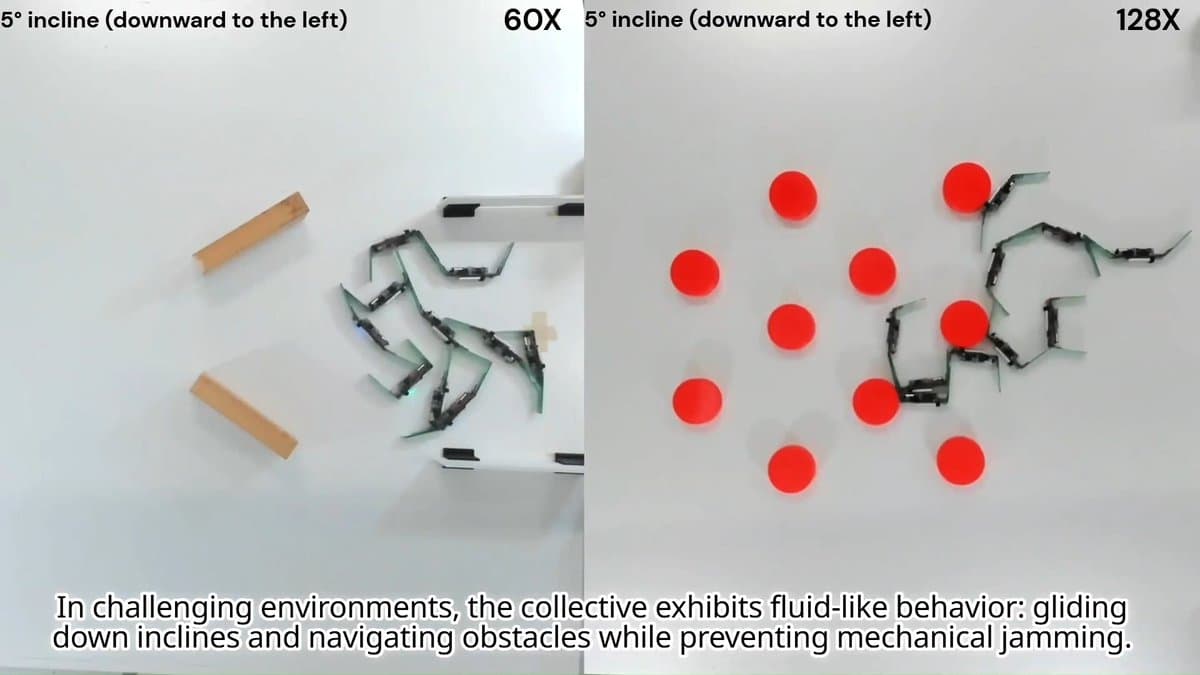
Tiny Robots Entangle to Navigate Obstacles Collectively
Introducing the Crosslink Collective, a system of small #robots that can become transiently entangled to move collectively and robustly around obstacles. Learn more in Science #Robotics: https://t.co/9loVKxqz9H https://t.co/Au0seO2NDt

Lightweight Open-Source Policy Stabilizes Unfamiliar Quadrotors in Wind
A new Science #Robotics study highlights an open-source, computationally light policy that can adapt to control unfamiliar quadrotors and stabilize against external perturbations like strong winds. @loiannog @jonas_eschmann https://t.co/b1UyRcLggD https://t.co/CeQT35aTis
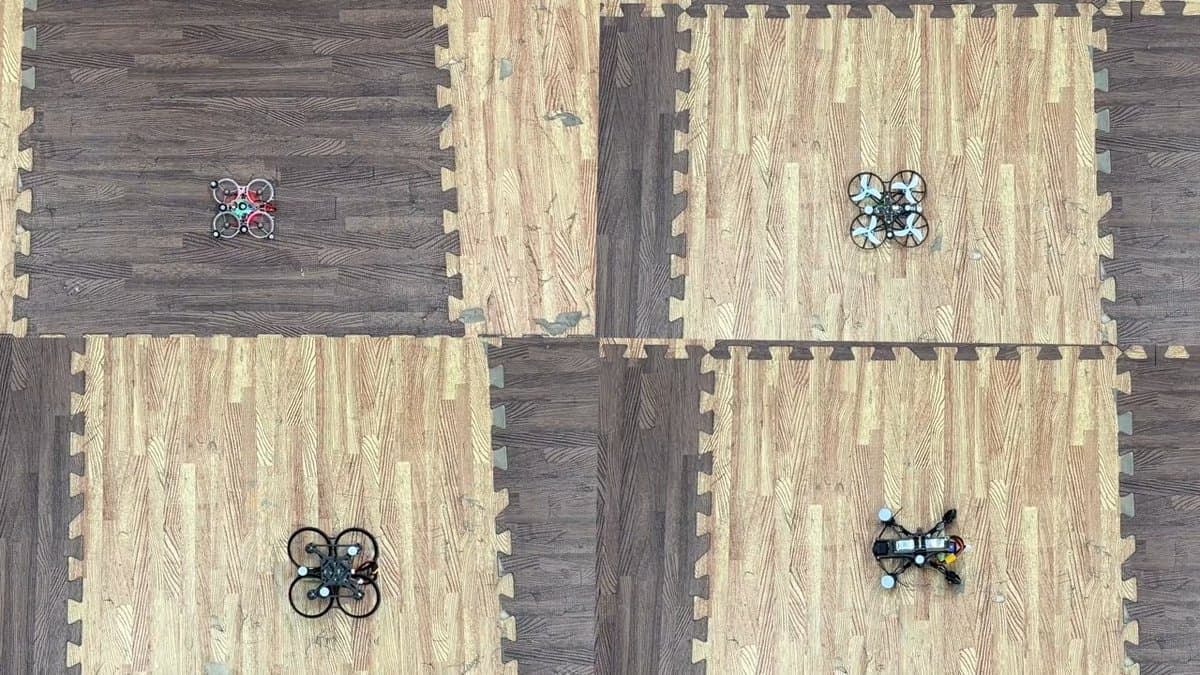
RAPTOR Lets One Neural Net Master All Quadrotors
A new framework called RAPTOR can train a neural network to adapt to and control a wide range of quadrotors in different environments without retraining. Learn more in Science #Robotics: https://t.co/KLq6UDs4TO https://t.co/MXGV7kXUp0

AUV Maps Coral Reef Biodiversity Hotspots Using Sight‑Sound Tracking
An #autonomous underwater vehicle equipped with a new framework can follow sights and sounds to detect and map #biodiversity hotspots in coral reefs. @WHOI Learn more in Science #Robotics: https://t.co/mNiv2IQkAf https://t.co/ThfGr9IXRJ
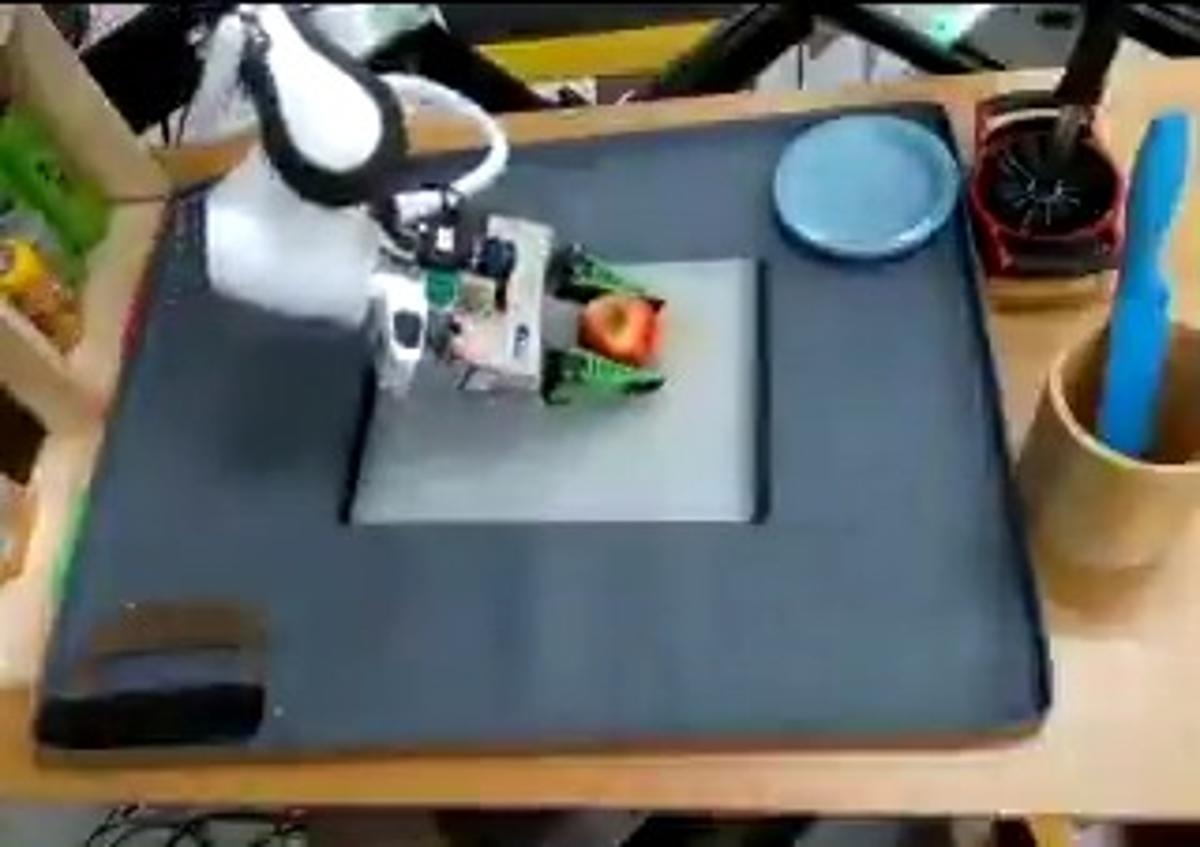
Fine‑tuned Large Behavior Models Boost Robot Task Learning
A new Science #Robotics study finds that “fine-tuned” large behavior models are more data-efficient and successful than single-task policies at teaching robots complex new tasks like coring and slicing an apple. https://t.co/T6OugH8W0f https://t.co/IB7129rua6

Self‑aware Robots Share Skills Across Joint Constraints
A Science #Robotics study classifies robots according to their joint constraints and endows them with this self-awareness, enabling diverse robots to learn the same skill safely and without retraining. https://t.co/fAPjb5AcEl https://t.co/ttO8voua0w
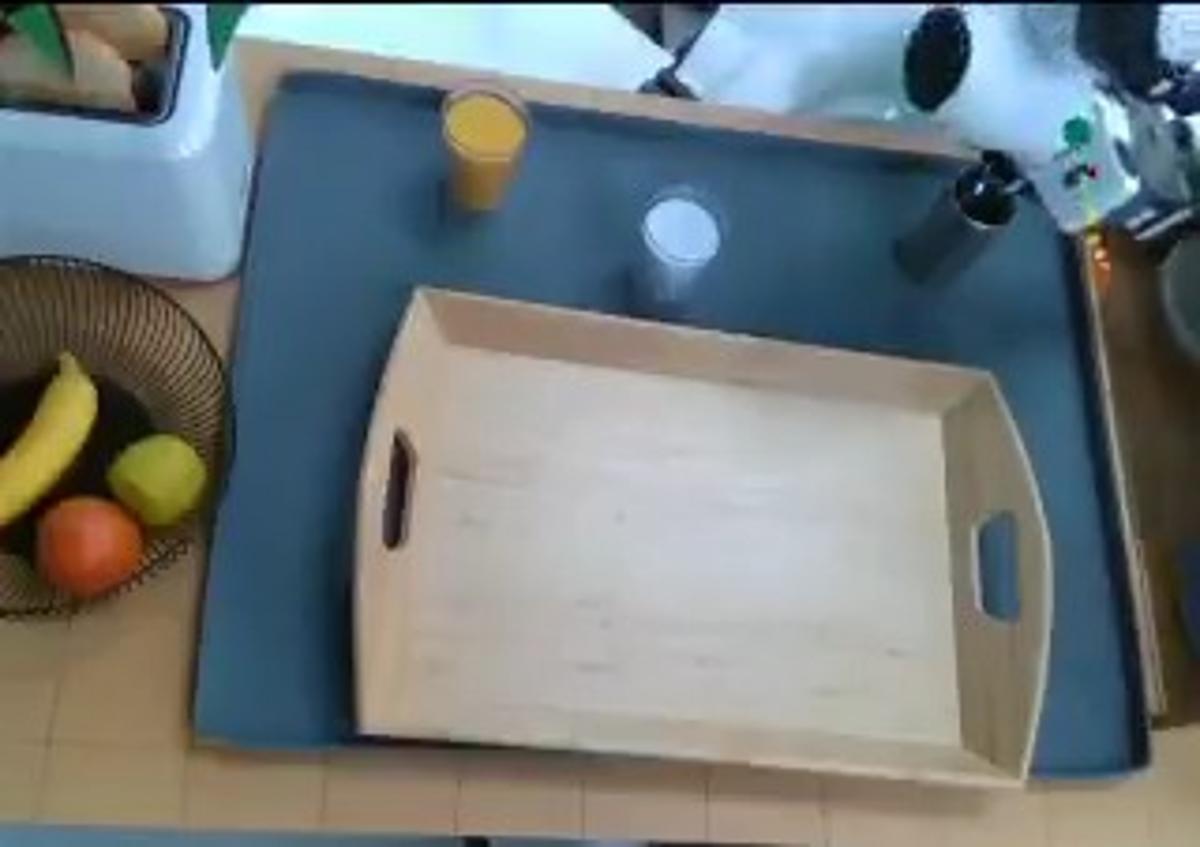
Multitask Behavior Models Boost Robot Manipulation Efficiency
Robots can learn complex #manipulation tasks, like assembling a breakfast tray, more efficiently using large behavior models and multitask datasets, when compared with single-task policies. Learn more in Science #Robotics: https://t.co/T6OugH8W0f https://t.co/KCrw3DqLfo
Foundation Models Enable Safer, Flexible Robot Swarm Decision‑Making
Implementing foundation models as robot swarm designers and operators could unlock more flexible decision-making and enhance human-robot interactions, with careful monitoring mechanisms to ensure safety. Learn more in Science #Robotics: https://t.co/VCOZ6sAKOa https://t.co/nsKs5pkib5
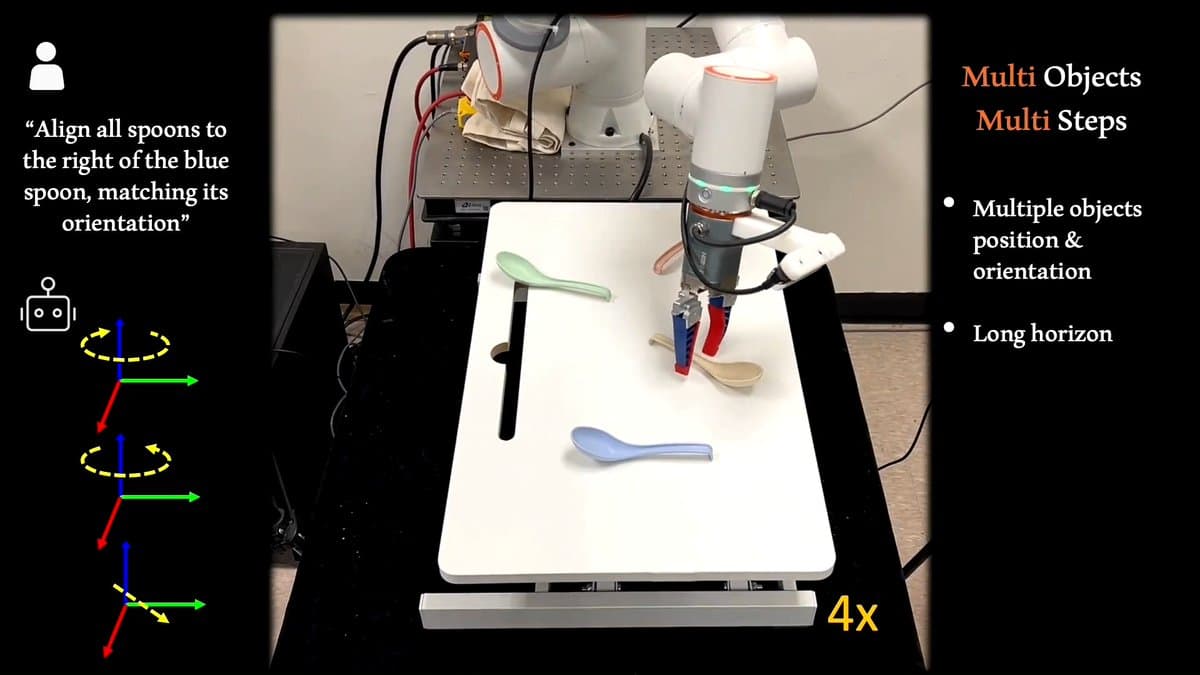
Large AI Models Gain Spatial Intelligence for Complex Robot Manipulation
A new Science #Robotics study endows large AI models with spatial intelligence, enabling them to guide robots through complex manipulation tasks such as orienting objects towards a camera or rearranging spoons to align them perfectly. https://t.co/HtYuOHGgTd https://t.co/5pEPLQOHeM