Tesseract & ROS-I Developer Monthly Meeting Revisit
Key Takeaways
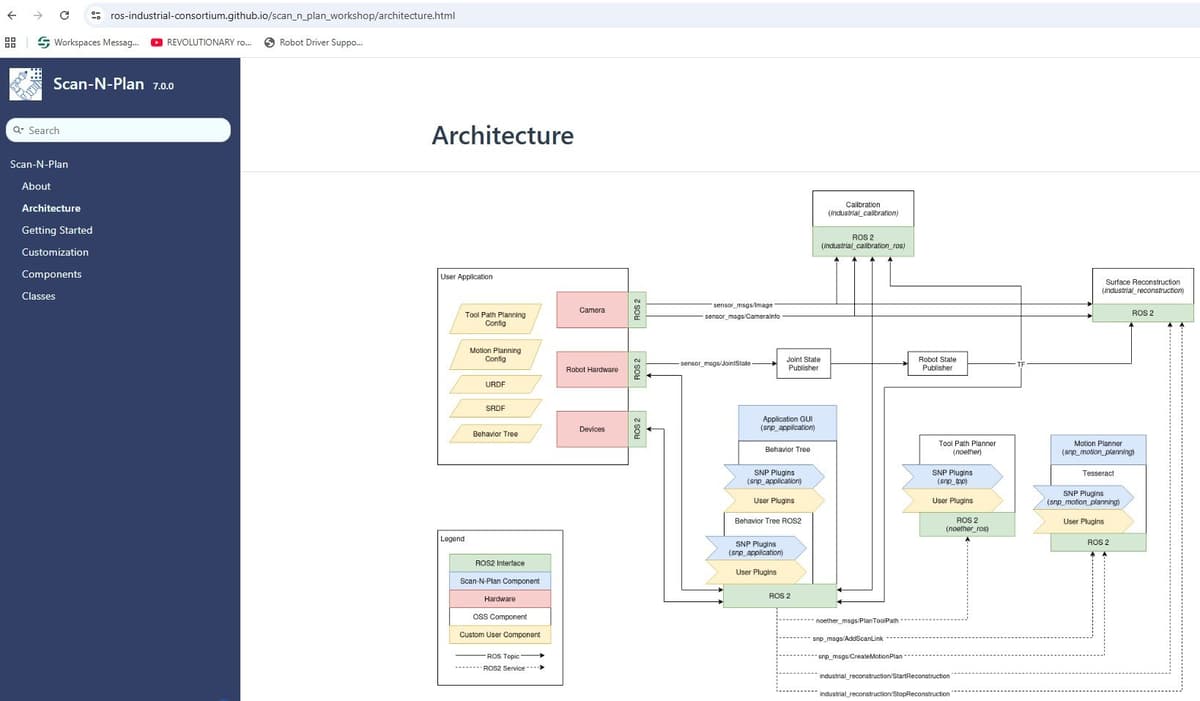
- •New docs added for Scan, Plan Workshop, and Noether repos
- •NanoBind replaces Swig for faster Tesseract Python bindings
- •VAMP integration brings SIMD‑accelerated motion planning to Tesseract
- •Cole collision checker gains 20‑30% speed boost, matching Bullet
- •Ubuntu 20.04 LTS and QT6 support slated for all repos
Pulse Analysis
ROS‑Industrial’s quarterly developer meetings serve as a critical forum for aligning open‑source robotics initiatives with the needs of manufacturers. By publishing refreshed documentation for core repositories such as Scan, Plan Workshop, and Noether, the community reduces onboarding friction and clarifies architectural decisions. These resources not only aid contributors but also provide industrial engineers with reliable reference material, accelerating the deployment of ROS‑based solutions in production environments.
On the technical front, the transition to NanoBind for Tesseract’s Python bindings promises lower latency and a cleaner build process compared with the legacy Swig approach. Coupled with the integration of OMPL 2.0’s VAMP planner, which leverages SIMD instructions for vectorized state evaluation, developers can expect markedly faster motion‑planning cycles. The Cole continuous collision checker’s 20‑30% performance uplift, now mirroring Bullet’s convex‑hull strategy, further tightens the compute budget for complex manipulation tasks. Additional efforts to replace string‑based structures with hash‑based equivalents and to introduce schema‑validation tools for YAML files signal a broader push toward code‑base robustness and maintainability.
From a business perspective, the announced July training session and the open‑source meetup at Automate 2026 in Chicago position ROS‑Industrial as a hub for knowledge exchange and ecosystem growth. Addressing ROS‑2 release‑process concerns—particularly around RMW and version compatibility—demonstrates a proactive stance toward industrial user stability. The planned migration to Ubuntu 20.04 LTS and QT6 ensures long‑term support and aligns the stack with enterprise‑grade operating environments, reinforcing confidence among manufacturers evaluating ROS‑based automation for future projects.
Tesseract & ROS-I Developer Monthly Meeting Revisit
Comments
Want to join the conversation?