Handle with Care: Soft Robot Gripper Picks Ripe Fruit without Bruising
Why It Matters
The ability to harvest delicate fruits robotically reduces waste, lowers labor costs, and enables diversified, sustainable farming practices that were previously uneconomical.
Key Takeaways
- •Soft gripper uses stretchable fiber‑optic sensors to gauge fruit stiffness
- •Dual sensors measure curvature and fingertip pressure for bruise‑free handling
- •Integrated planetary gear twists fruit off vine, reducing harvest damage
- •Camera addition enables detection of occluded fruit for diverse crops
- •Technology could enable mixed‑species farming and reduce pesticide use
Pulse Analysis
The agricultural sector has long struggled with the paradox of needing gentle handling for high‑value produce while maintaining mechanized efficiency. Cornell’s recent breakthrough in soft robotics offers a practical solution by endowing a gripper with a sense of touch comparable to human fingertips. Using stretchable fiber‑optic strain gauges, the device quantifies the stiffness of a strawberry, translating that data into a ripeness score that aligns with visual cues. This tactile intelligence bridges the gap between perception and action, allowing robots to make nuanced decisions that were previously limited to skilled labor.
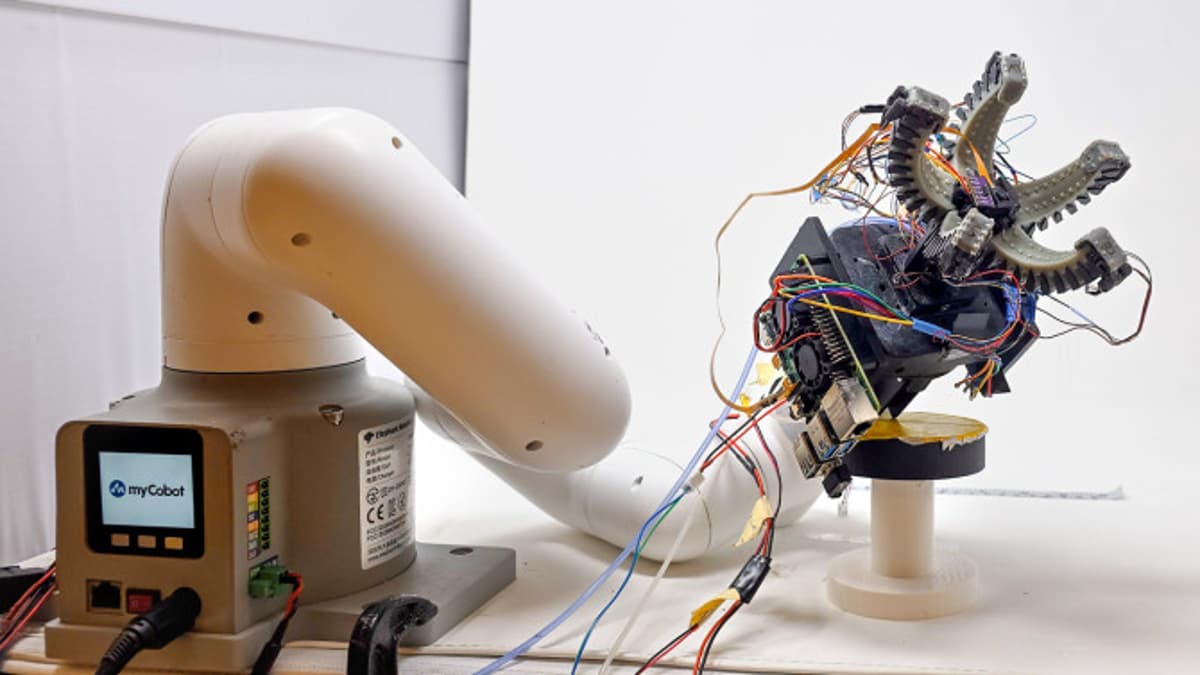
The gripper’s architecture pairs two fiber‑optic sensors—one tracking finger curvature, the other measuring fingertip pressure—with a compact planetary‑gear wrist that can rotate and gently twist fruit from its stem. This mechanical nuance eliminates the pulling forces that typically bruise berries, while an integrated camera scans the palm for hidden fruit, extending the system’s utility to crops where visual cues are insufficient. Validation trials on strawberries showed a high correlation between sensor‑derived stiffness and conventional color‑based ripeness assessments, confirming that tactile feedback can reliably guide harvest timing.
Beyond immediate yield gains, the technology could reshape farm design by supporting mixed‑species planting and reducing reliance on pesticides. Small, agile robots capable of precise, fruit‑specific handling make it economically viable to cultivate varieties such as pawpaws, avocados or pineapples that are currently limited by labor‑intensive harvests and post‑harvest loss. Backed by the NSF’s Center for Research on Programmable Plant Systems and Cornell’s Institute for Digital Agriculture, the gripper exemplifies how interdisciplinary research can accelerate the transition to resilient, low‑input agriculture while opening new market opportunities for specialty produce.
Handle with care: Soft robot gripper picks ripe fruit without bruising
Comments
Want to join the conversation?
Loading comments...