TESOLLO Uses Own Actuator in DG-5F-S Humanoid Robotic Hand
•January 12, 2026
0
Why It Matters
By developing proprietary high‑torque actuators, TESOLLO cuts costs and boosts performance, accelerating the shift of humanoid robot hands from labs to commercial applications.
Key Takeaways
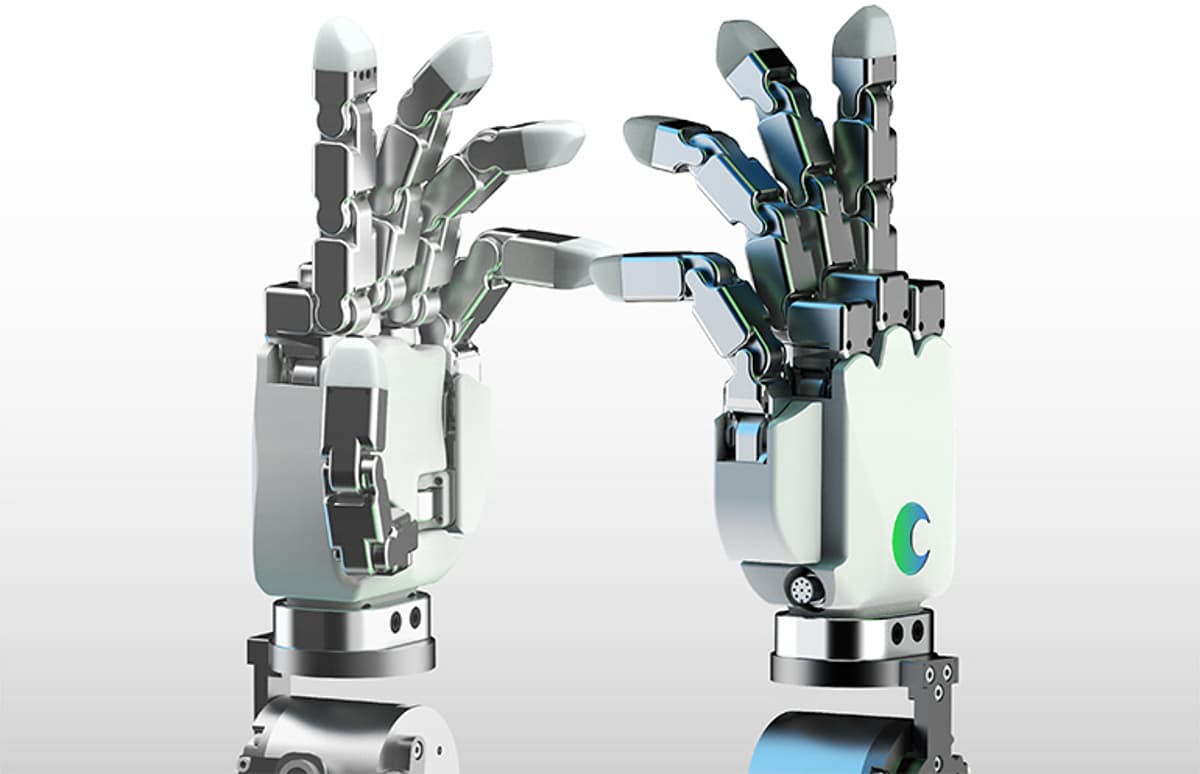
- •DG-5F-S weighs under 1 kg, human‑hand size
- •Uses proprietary high‑torque density actuators
- •Price about 60% of previous DG-5F model
- •20 DoF, five‑finger, direct‑drive design
- •Supports tactile sensors, waterproof covers, standard protocols
Pulse Analysis
The robotics market has long grappled with the trade‑off between actuator performance and system cost. Conventional robot hands often rely on off‑the‑shelf motors that add weight, increase backlash, and inflate prices, limiting their appeal beyond research settings. TESOLLO’s decision to engineer its own high‑torque density actuators reflects a broader industry trend toward vertical integration, where manufacturers seek tighter control over component specifications to deliver lighter, more reliable platforms.
The DG‑5F‑S embodies this strategy with a compact, under‑1 kg form factor and a direct‑drive architecture that eliminates gear backlash, delivering sub‑millimeter positional accuracy. Its 20 degrees of freedom across five independently driven fingers replicate human dexterity, while the inclusion of industry‑standard communication protocols and optional tactile sensors simplifies integration into diverse humanoid platforms. By pricing the hand at roughly 60% of the earlier DG‑5F, TESOLLO makes high‑precision manipulation accessible to startups and midsize enterprises that previously faced prohibitive costs.
For end users, the DG‑5F‑S could accelerate deployment of humanoid robots in sectors such as logistics, healthcare, and manufacturing, where delicate object handling is critical. The hand’s lightweight design reduces overall robot payload, extending battery life and enabling more agile motion. As more global firms adopt the DG‑5F‑S—already exported to 16 countries—TESOLLO positions itself as a key supplier in the emerging commercial humanoid market, potentially prompting competitors to pursue similar in‑house actuator solutions to stay competitive.
TESOLLO uses own actuator in DG-5F-S humanoid robotic hand
0
Comments
Want to join the conversation?
Loading comments...