
Free Tomorrow: Unique Model Beats Benchmarks, Fast Endpoint
If you've not taken the time to check this model out, it's free for one more day through openrouter. Tough one to run locally, but it's quite good and the endpoint here is fast. I'd say it outperforms what it's benchmark rankings say, and seems to be a very unique model.

AI Code Assistants Erode Developer Thinking and Planning
Still heavily using hermes + minimax M2.7 for daily code development largely in place of claude code w/ opus 4.7. I'm at 21M tokens so far, mostly because I wasn't using with work til I could get a license...
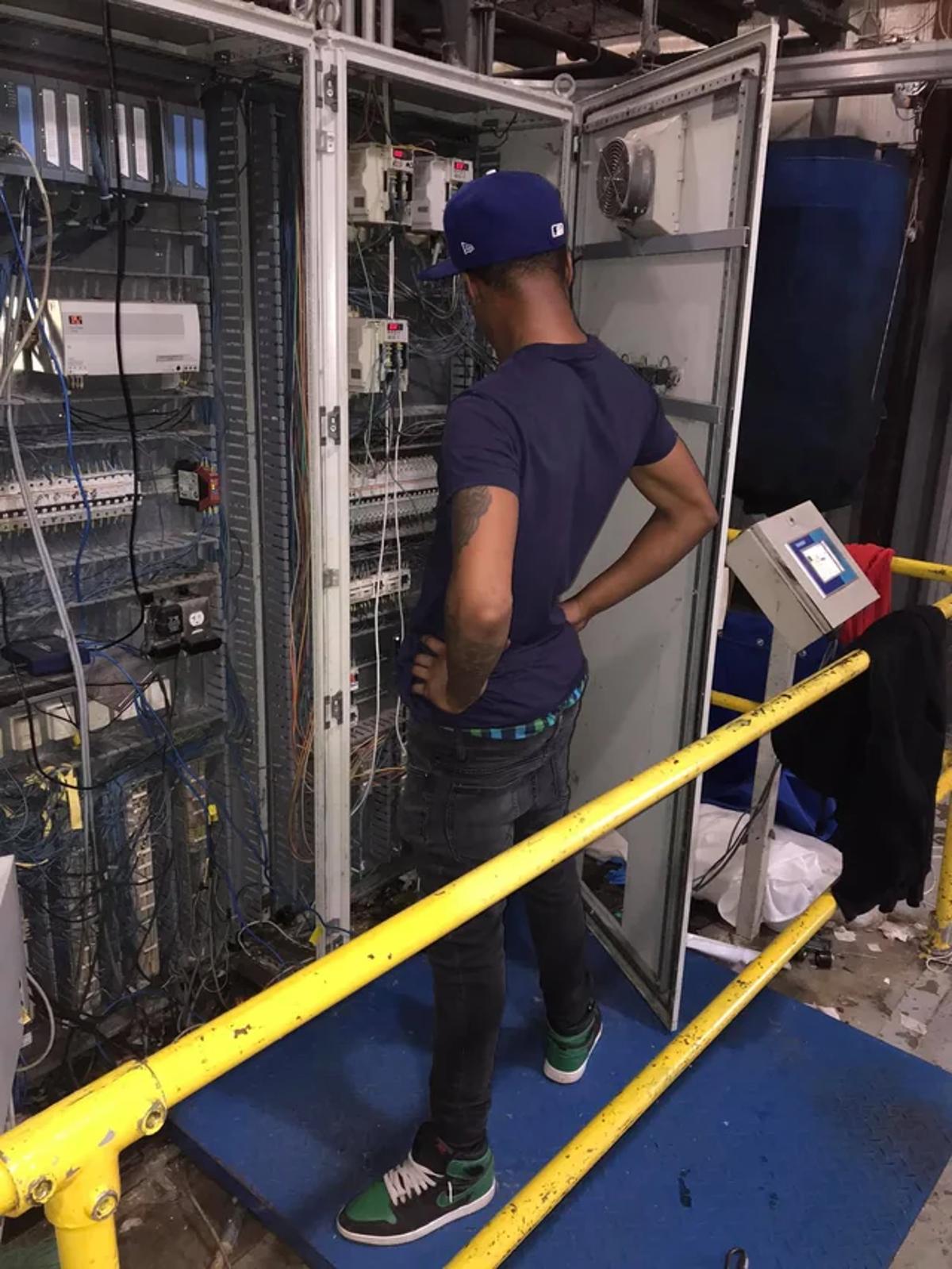
Lightning Outage Forces Hands‑on Cable Hunt, Meme Realized
lightning knocked out a couple of my networking switches, found myself standing at my rack hands on hips trying to trace all the cabling and solve the puzzle of which switches were still alive and realized i was literally doing...

Low‑Power GB10 GPUs Deliver 50 T/S Quietly
While I also have a bunch of GPUs, I really enjoy the GB10s I have, which are the same as Sparks. Very low power usage, make no noise, generate very little heat, take up little space. Always on and available....

M2.7 with Hermes CLI Replaces Most Claude for Coding
M2.7 w/ hermes cli is replacing ~75% of my claude code / opus usage now, but we need clarity for using it as a coding agent @ work. We're truly blessed to have the weights of this one, looking forward to...

Q4_K_XL 4-Bit Shines for M2.7 Local Runs
Some stats when running M2.7 locally at various quants and machine configs. Based on M2.5 research, the Q4_K_XL is probably best performer @ 4bit for this particular model, seems worth the trade in t/s. I tried various configs to get the GPU+CPU...

Model Drifts Unnoticed While Provider Denies Any Change
I just want my model's behavior to stop changing while the provider gaslights me telling me nothing has changed.
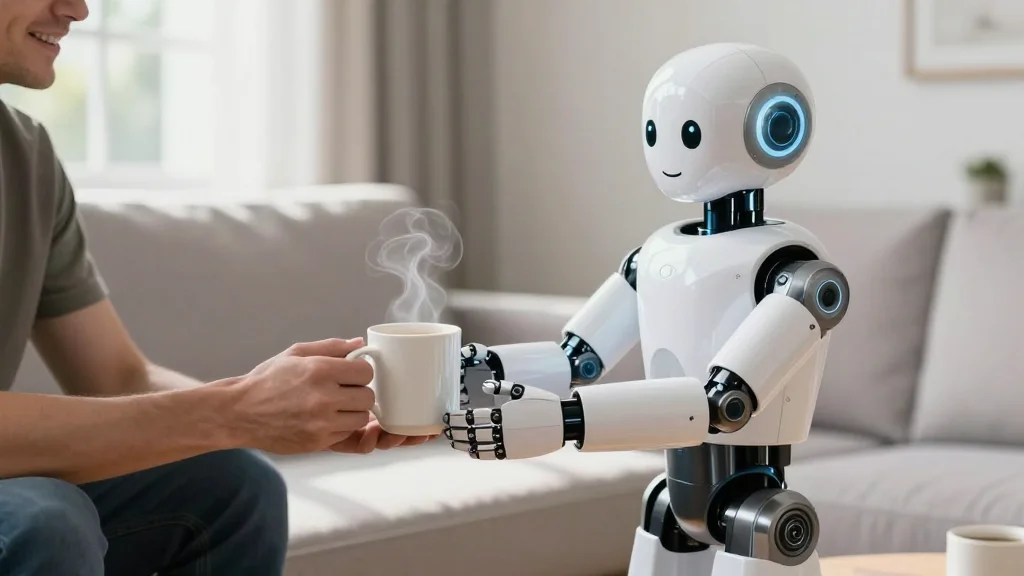
Consumers Crave Humanoids Even if Engineers Resist
What I usually tell people about humanoids is: The heart wants what the heart wants. People want humanoids. Roboticists want to change form factor because humanoids are hard. But consumers want humanoids.

Dell GB10 Cluster Powers
3x Dell GB10s, 128GB unified memory each, 384GB memory for the cluster, mesh connected over 200Gbps QSFP, currently running Trinity-Large-Thinking (398B) Q4_K_M 17-18 t/s. Will review this model in time. Using as coding agent and via Hermes. https://t.co/u2fKP1V0NE

KimoLab Merges Kimodo and Mjlab For
Introducing KimoLab: Kimodo + mjlab for prompt to physics-based motion matching for the unitree g1. I accidentally had claude make this and it's actually pretty cool. https://t.co/TIOFHFnZLi

Nvidia Engineers Burning $250K Tokens on Projects
You're gonna have to show me what these nvidia $500K engineers are doing to spend $250K in tokens. https://t.co/iibICUiTPO
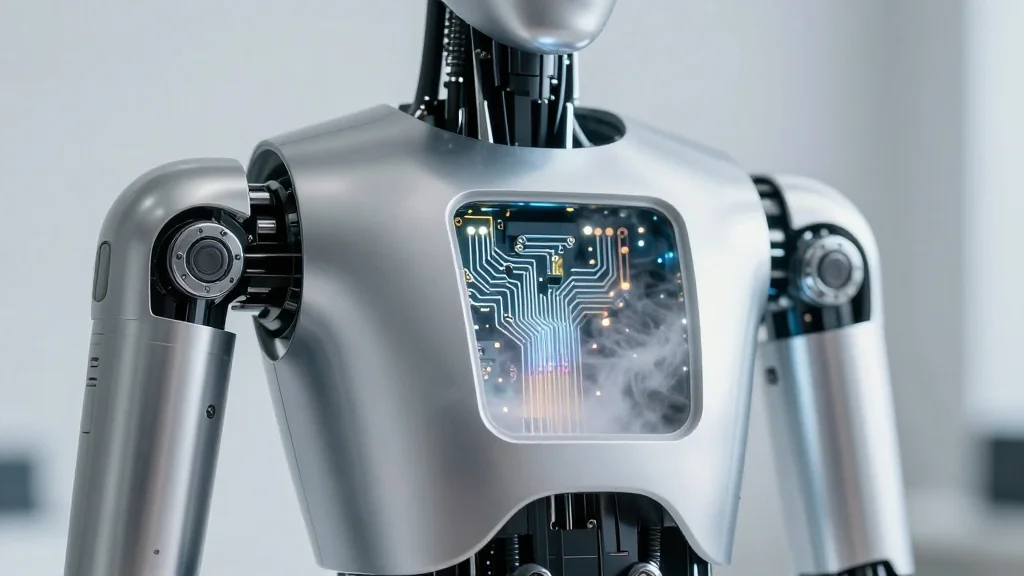
Demo Ambiguity Fuels Overestimation of Tech Capabilities
It's not always a bold lie either. In demos for example, certain things are not made clear and left up to the viewer to just "guess." I cannot help but think the intent is to encourage and allow the viewer, journalists,...

Humanoid Robots Find Floor Pickup Harder Than Backflip
picking something up off the floor w/ a humanoid is more challenging than a backflip https://t.co/xvqORaNi7Q

SAC Simplifies Quadruped Gait Tuning over PPO
In a world of PPO everything for reinforcement learning, I've been tinkering with SAC for training a quadruped gait. This gait is trained purely on CPU (training on one of the Dell GB10s) on a single environment. Training any particular run...

Incentives Keep Frontier AI Labs Private, Excluding Public Investors
it's deeply unfortunate that incentives have aligned such that all these frontier AI labs and other tech companies are way better off staying private and the general public cannot invest in them despite desperately wishing they could.