This 'Crawling' Robot Rolled Around the Moon and Took a Historic Photo
Why It Matters
The demonstration proves that compact, autonomous rovers can provide critical diagnostics and extend the reach of larger landers, shaping the design of cost‑effective lunar and Martian exploration architectures.
Key Takeaways
- •LEV‑2 operated for ~100 minutes before communication loss
- •Rover captured first clear images of upside‑down SLIM lander
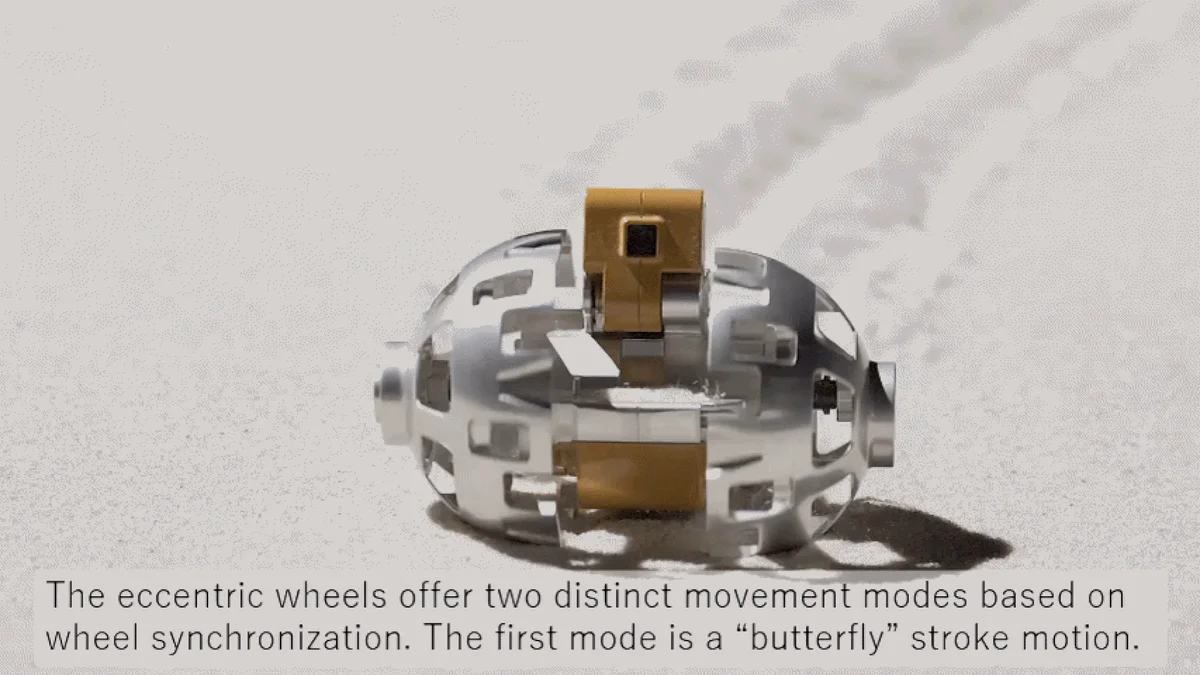
- •Morphable spherical design enabled navigation over lunar dust
- •Wireless link through LEV‑1 demonstrated distributed rover communication
- •Lessons call for higher telemetry cadence and software flexibility
Pulse Analysis
Japan’s SLIM mission marked a milestone not only for national prestige but also for robotic innovation. After a soft touchdown in January 2024, the lander’s solar arrays underperformed, forcing engineers to rely on reserve batteries. In response, SLIM released two miniature rovers—LEV‑1, a hopping scout, and LEV‑2, a shape‑shifting sphere reminiscent of a BB‑8 droid. LEV‑2’s internal wheels reconfigured its profile to tackle uneven regolith, allowing it to circle the stranded lander, capture high‑resolution photos, and relay them through LEV‑1’s radio link. The operation lasted about 100 minutes, delivering the first clear visual evidence that SLIM had landed face‑down.
The technical achievements of LEV‑2 extend beyond a single photo dump. Its autonomous navigation relied on onboard image processing to make real‑time path decisions, a capability traditionally reserved for larger rovers. The wireless handoff to LEV‑1 showcased a distributed communication architecture, reducing the need for a direct line to the main spacecraft. However, the mission also exposed constraints: telemetry was sent only every 32 seconds, and software pre‑loaded states limited adaptability. Researchers now advocate for higher telemetry cadence, more robust inter‑rover links, and flexible software that can handle unforeseen terrain challenges.
Looking ahead, the LEV‑2 experiment informs the next generation of planetary exploration. Morphable mobility and cooperative robot swarms could enable cost‑effective scouting of hazardous zones on the Moon or Mars, where traditional landers risk damage. By offloading diagnostics and data collection to small, expendable units, agencies can mitigate mission risk and extend scientific return without the expense of large, single‑point platforms. The lessons from SLIM’s rover suite are already influencing design studies for upcoming lunar gateway projects and commercial Mars concepts, underscoring the growing strategic value of distributed robotic systems.
This 'crawling' robot rolled around the moon and took a historic photo
Comments
Want to join the conversation?
Loading comments...