
IROS 2025 Keynotes - Mechanisms and Controls: Eiichi Yoshida
The IROS 2025 keynote by Eiichi Yoshida examined how contact‑rich human motions can be harvested to advance humanoid robot mechanisms and control. Yoshida traced the evolution from a handful of humanoid platforms in 2022 to a burgeoning ecosystem of commercial robots, emphasizing that mastering multi‑contact locomotion and manipulation remains the next frontier. He outlined a hybrid research agenda that blends model‑based planning with data‑driven learning. By instrumenting humans with tactile skins from the Technical University of Munich, the team captures whole‑body force distributions, maps them onto standard human shape models, and uses inverse optimal control to infer latent cost functions. A self‑attention BQVA network trained on motion‑capture datasets reconstructs ground‑reaction forces and automatically annotates foot‑ground contact states, dramatically cutting manual labeling. Demonstrations included a robot maintaining balance on a narrow beam using full‑body tactile feedback, and a visual‑tactile transformer that combines RGB images with skin data to imitate fragile‑object manipulation from a few tele‑operation demos. The system can predict contact forces and adjust grip softness even for unseen objects, showcasing the power of integrated tactile sensing and imitation learning. The work signals a shift toward robots that navigate tight spaces, handle delicate items, and transfer skills across embodiments with minimal human supervision. By automating contact annotation and embedding human‑derived cost metrics, developers can accelerate the deployment of safe, adaptable humanoids for logistics, healthcare, and service sectors.

IROS 2025 Keynotes - Mechanisms and Controls: Fei Miao
The keynote by Fei Miao focused on advancing uncertainty understanding and safe, robust reinforcement learning for multi‑agent robotic systems, with autonomous driving as a primary example. Miao highlighted the gap between high‑performance perception models and their lack of calibrated uncertainty,...

IROS 2025 Keynotes - Mechanisms and Controls: Kenjiro Tadakuma
Kenjiro Tadakuma’s IROS 2025 keynote centered on a sweeping portfolio of novel mechanisms and control concepts, ranging from omni‑directional locomotion modules to bio‑inspired soft actuators. He framed the discussion around the invention process, showcasing dozens of prototype models that illustrate both...

Manifest Vegas | Dan Keto, Easy Metrics, on Warehouse Performance Management
At Manifest Vegas, Easy Metrics co‑founder Dan Keto explained how distribution centers are moving from simple labor tracking to a holistic, engineering‑driven Warehouse Performance Management model. He emphasized that the proliferation of robotics and siloed software creates a fragmented data...

Operating Drones in Battlespaces Where GPS Can't Be Trusted
At the World Defense Show, Shield AI highlighted its AI‑driven unmanned aircraft designed for GPS‑denied battlefields, emphasizing trusted autonomy and sovereign control. The company unveiled its latest vertical‑takeoff‑and‑landing (VTOL) strike platform, the Expat, powered by a GE F‑110 engine that...
2026 Winter Robotics Colloquium: Aaron Borger (Orbital Robotics)
Aaron Borger, co‑founder and CEO of Orbital Robotics, presented the company’s vision for AI‑controlled robotic arms that can capture, refuel, repair, or de‑orbit spacecraft in orbit. The firm aims to provide space‑grade hardware and integrated software to any satellite...
Manifest Vegas | Cam Myers, CreateMe Technologies on Onshore Automation and AI-Powered Robotics
CreateMe Technologies, led by Cam Myers, is deploying AI‑driven robotics to automate soft‑material handling, a long‑standing barrier in apparel manufacturing. By pairing machine‑learning perception with a custom robotic stack, the firm replaces traditional stitching with high‑speed adhesive bonding. This enables...

AI Floods Open Source, Olympic Drones, and Robot Prizefighting | TSG Ep. 1020
The episode of TechStrong TV featured Brian Dawson, director of product management Linux at CIQ, discussing the company’s launch of a hardened version of Rocky Linux designed to meet the security demands of the AI‑driven compute era. Dawson highlighted that AI...

First Public #Zoox Ride in Las Vegas
The video documents the author’s first public ride in a Zoox autonomous vehicle in Las Vegas, part of a limited free‑service pilot that requires only a credit‑card‑linked app download. The eight‑seat pod offers individual climate and music controls at four user...

DiskChunGS: Large-Scale 3D Gaussian SLAM Through Chunk-Based Memory Management
DiskChunGS introduces a scalable 3D Gaussian splatting SLAM pipeline that overcomes traditional GPU memory constraints by treating scene reconstruction as a spatial streaming problem. The system partitions the environment into discrete chunks, keeping only the currently visible regions in GPU...
Precision Landing with PX4 and ROS 2 Using Aruco Markers
The session, led by PX4 maintainer Benjamin and Linux Foundation’s Ramon, introduced a new workflow for achieving precision landing on drones by integrating the PX4 autopilot stack with ROS 2. Key technical points included the use of PX4’s uORB middleware extended to...

IROS 2025 Keynotes - Embodied Intellgence: Fumin Zhang
The IROS 2025 keynote by Fumin Zhang examined how robots can perform high‑stakes search and rescue tasks by marrying classic search theory with modern generative AI and control techniques. Zhang highlighted that, despite a half‑century of research, the field has...

IROS 2025 Keynotes - Embodied Intellgence: Fumiya Lida
Fumiya Lida’s IROS 2025 keynote framed embodied intelligence as the reciprocal relationship between a body’s physical dynamics and the brain’s control mechanisms, challenging the longstanding brain‑versus‑body dualism that has split robotics from AI. He highlighted the staggering scale gap—30 trillion cells...
These Aren't the Ob/Gyn Droids We're Looking For
The video highlights Alabama’s acute shortage of obstetric‑gynecologists in many rural counties and the state’s experimental response: deploying robotic ultrasound systems to scan pregnant patients remotely. Ultrasound imaging is vital for high‑risk pregnancies—cervical‑length measurement, fetal growth monitoring, and still‑birth prevention—but traditional...
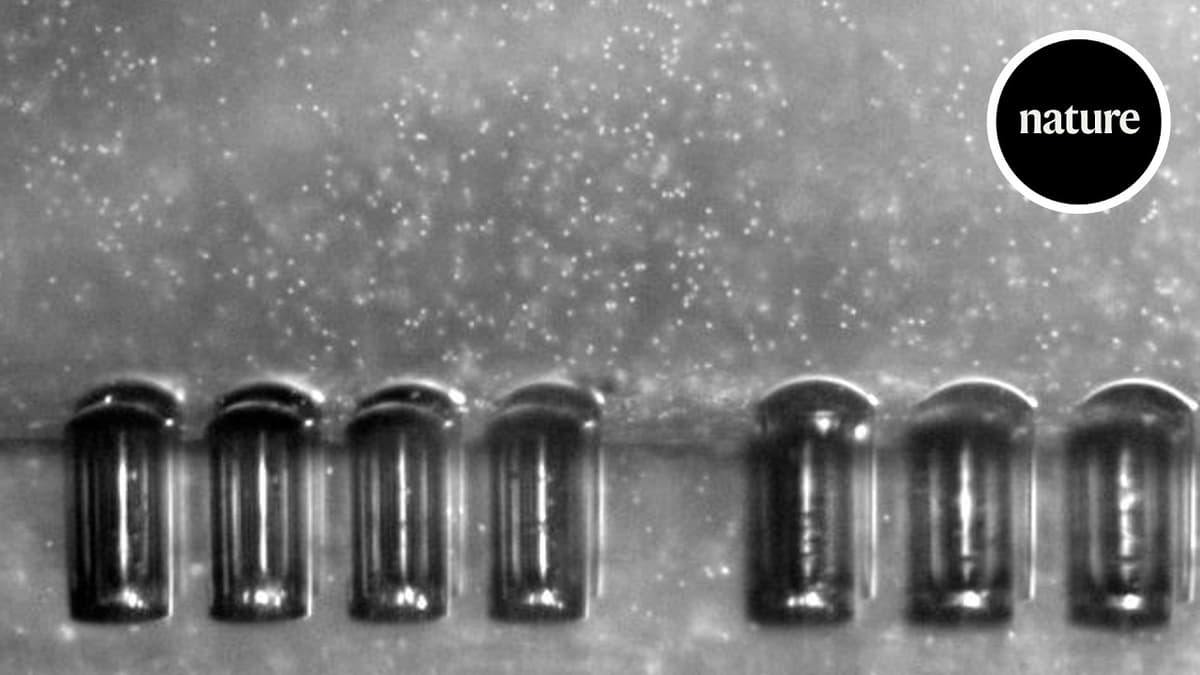
Tiny Robot Fish Could Swim Through the Body Powered by Ultrasound
The video introduces acoustic robotics, where tiny polymer devices are powered solely by ultrasound‑induced bubble dynamics, eliminating wires, batteries, or magnets and opening the door to fully wireless medical microrobots. A thin polymer sheet is laser‑molded with thousands of sub‑millimetre cavities...
What Really Happens When a Robot Draws Your Blood?
The video examines Vitestro’s robotic blood‑drawing system, which uses ultrasound to locate a vein, positions the arm, inserts the needle, collects the sample, retracts the needle and applies a bandage—all without human hands touching the needle. The device already carries...

IROS 2025 Keynotes - Medical Robots: Li Zhang
Li Zhang’s IROS 2025 keynote highlighted the rapid evolution of miniature biomedical robots, emphasizing magnetic actuation, bio‑hybrid materials, and modular architectures for safe, targeted therapy. He traced the concept back to Richard Feynman’s swallowable‑surgery vision and described how his team fabricates...

IROS 2025 Keynotes - Human Robot Interaction Session: Javier Alonso-Mora
The IROS 2025 Human‑Robot Interaction keynote by Javier Alonso‑Mora centered on the challenges and breakthroughs in multi‑agent autonomy for mobile robots. He outlined how robots must not only navigate complex, dynamic environments but also cooperate with other robots and humans...

IROS 2025 Keynotes - Perception and Sensors: Perla Maiolino
The keynote highlighted the limits of pure deep‑learning approaches for robot cognition, arguing that true general intelligence requires embodied, tactile experience. Perla Maiolino described how artificial skin (SciSkin) and distributed proximity sensors give robots a closed‑loop sense‑act‑perceive cycle, allowing safe,...

𝗜𝗻𝗱𝘂𝘀𝘁𝗿𝘆 𝟰.𝟬 𝗥𝗲𝗮𝗹𝗶𝘁𝘆 𝗖𝗵𝗲𝗰𝗸: What’s Working, What’s Not, and What’s Next
Eric Kimberling, CEO of Third Stage Consulting, hosted a solo “Industry 4.0 Reality Check” session after his guest canceled, framing a wide-ranging discussion on manufacturing technology trends, what’s working, and what’s overhyped. He emphasized his firm’s manufacturing focus, invited audience...

The Real Reason America Needs Robots - Elon Musk
Elon Musk uses a recent interview to argue that America’s manufacturing lag, especially in rare‑earth refining, can only be closed with advanced robotics. He points out that China processes roughly twice the global ore output, and the United States routinely...

Stanford Robotics Seminar ENGR319 | Winter 2026 | Bringing AI Up To Speed
The lecture framed autonomous driving as the ultimate test for artificial intelligence, contrasting it with games like chess that have already been mastered by AI. While chess operates in a closed, rule‑bound environment, driving unfolds in an open system where...

Design and Testing of Autonomous Vehicles
The video introduces a senior capstone course, Design and Testing of Autonomous Vehicles, where students build a complete autonomous landing system that mimics lunar‑lander challenges. The class moves from mission definition through requirements, software architecture, and finally hardware integration, tasking...

Differentiable Weights-Varying Nonlinear MPC via Gradient-Based Policy Learning (IEEE RA-L)
The paper presents the first differentiable Model Predictive Control (MPC) framework that can vary its cost‑function weights online for constrained nonlinear systems, leveraging gradient‑based policy learning. A lightweight neural network receives real‑time observations—such as reference trajectory curvature and velocity—and outputs MPC...

Atlas Airborne | Boston Dynamics & @Rai-Inst
Now that the Atlas enterprise platform is getting to work, the research version gets one last run in the sun. Our engineers made one final push to test the limits of full-body control and mobility, with help from the RAI...

Intro to Bedrock Robotics
In February 2026 the company closed $270M series B, to begin the first stages of commercialization and production deployments later this year.

Jee Hwan Ryu - "Soft Growing Robots: From Disaster Response to Colonoscopy"
Jee Hwan Ryu presented the latest advances in soft‑growing "vine" robots, machines that extend their bodies by everting material rather than moving a rigid chassis. This eversion‑based locomotion lets the robot slip through tight, slippery or even vertical passages,...

Kevin Chen - "Agile and Robust Micro-Aerial-Robots Driven by Soft Artificial Muscles"
Kevin Chen’s presentation spotlights a new generation of insect‑scale aerial robots that combine soft artificial muscles with rigid airframes, challenging the conventional view that soft robots are inherently slow and imprecise. By leveraging dielectric elastomer actuators capable of hundreds of...

Xifeng Yan - "Adaptive Inference in Transformers"
Xifeng Yan, a UC Santa Barbara researcher, presented an adaptive inference framework for transformer models, highlighting its relevance to emerging robotics applications that increasingly rely on large‑scale language and vision transformers. He argued that the uniform computational cost per token...

Karinne Ramirez Amaro- "Transparent Robot Decision-Making with Interpretable & Explainable Methods"
The presentation focused on making autonomous robots transparent by integrating interpretable and explainable AI methods. Ramirez outlined a five‑layer model—intention, reasoning, capabilities, prediction, and context—designed to let humans understand a robot’s internal decision process. Key technical contributions include a semantic decision‑tree...

Fuchun Sun - Knowledge-Guided Tactile VLA
Fuchun Sun outlines a knowledge-guided approach to embodied vision-language-action (VLA) agents that integrates tactile sensing and physical awareness with large language models. He argues tactile feedback closes the semantic–physics gap—enabling fine force control, collision detection, and perception of material properties—critical...
Moons Q&A Special | Q&A 392
Host answers listener questions about exploration of icy moons, outlining a variety of nontraditional rover concepts—large-wheeled vehicles, rocket-assisted hoppers, snake-like robots, under-ice crawlers and rappelling bots—designed to handle pulverized ice, spikes and cliffs. He notes hoppers that leap on ballistic...

Sprout the Friendly Robot
Fauna Robotics’ new general-purpose platform Sprout is drawing attention from major partners including Disney and Boston Dynamics as a safe, human-friendly robot designed for research labs. Demonstrated by IEEE Spectrum’s editor, Sprout can be teleoperated via VR paddles, controlled through...

Hyoun JIN Kim - "Autonomous Aerial Manipulation: Toward Physically Intelligent Robots in Flight"
Seoul National University researcher Hyoun Jin Kim reviewed advances and remaining hurdles in autonomous aerial manipulation, arguing that drones must move beyond sensing to physically interacting with environments. He highlighted core technical challenges—limited thrust, stability during contact, unknown interaction forces,...

Marco Hutter - "The New Era of Mobility: Humanoids and Quadrupeds Enter the Real World"
Marco Hutter traced the rapid maturation of legged robotics from his ETH Zurich PhD work on dynamically balancing quadrupeds to commercial deployments today, highlighting advances in actuation, autonomy, sensing and system-level robustness. He described early field trials that exposed reliability...

Actor-Critic MPC: Differentiable Optimization Meets Reinforcement Learning for Agile Flight (TRO'25)
The paper presents Actor‑Critic Model Predictive Control (ACMPC), a hybrid framework that merges a differentiable MPC module with an actor‑critic reinforcement‑learning architecture to achieve agile flight in highly nonlinear quadrotor systems. By embedding a dynamics model directly into the MPC, the...
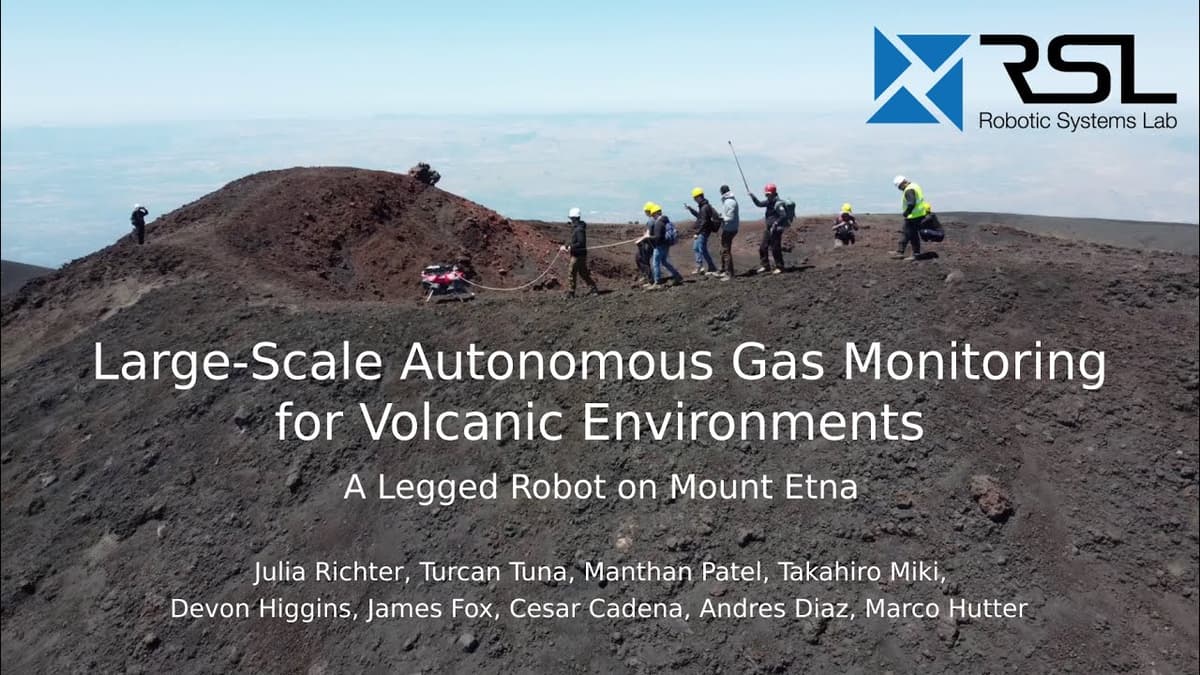
Large-Scale Autonomous Gas Monitoring for Volcanic Environments: A Legged Robot on Mount Etna
The video introduces a quadruped robot designed to autonomously monitor volcanic gases on Italy’s Mount Etna, addressing the long‑standing challenge of sampling in unstable, toxic terrain. Equipped with a commercial quadrupole mass spectrometer, the robot combines global localization and terrain‑aware navigation,...
Multi-Task Reinforcement Learning for Quadrotors
The video introduces a multitask reinforcement‑learning framework that trains a single, generalist controller for quadrotors capable of handling stabilization, high‑speed racing, and velocity‑tracking commands. By partitioning sensor inputs into shared and task‑specific observations, the system feeds each through a common...
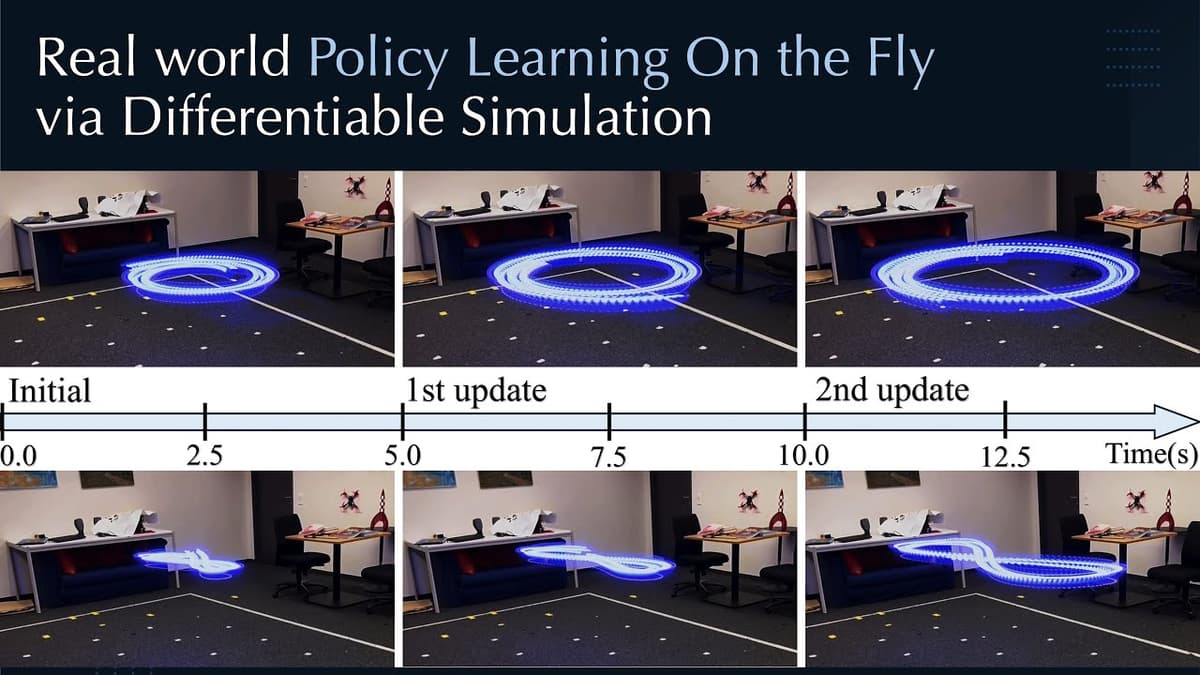
Learning on the Fly: Rapid Policy Adaptation via Differentiable Simulation (RA-L 2026)
The paper introduces a novel online learning framework—Rapid Policy Adaptation via Differentiable Simulation (RA‑L 2026)—that lets quadrotor controllers adjust to unknown disturbances in seconds during real‑world deployment. The method starts with a low‑fidelity, fully differentiable dynamics model to train a policy...
Build an App with Arduino App Lab - Arduino Uno Q Part 2
The video walks viewers through Arduino App Lab, a nascent IDE for the Arduino Uno Q that blends Python on the board’s micro‑computer with C++ on its microcontroller. It explains the board’s dual‑processor architecture—QRB2210 running Debian Linux and STM32U585 running...

Alpamayo Debuts at CES 2026
At CES 2026 NVIDIA introduced Alpamayo, an open‑source ecosystem designed to push autonomous‑driving technology toward Level 4 capability by embedding reasoning into AI models. The announcement highlighted a suite of components—including a large‑scale data set, a closed‑loop simulation framework, and a...

Atlas | Product Features | Boston Dynamics
Boston Dynamics’ Atlas humanoid robot is a 1.9 m, 90 kg platform with 56 degrees of freedom and a 2.3 m reach, capable of instant payloads up to 50 kg and sustained loads of 30 kg. The system supports continuous...

The Beginning of Your Tomorrow I Boston Dynamics
The video, titled “The Beginning of Your Tomorrow,” introduces Boston Dynamics’ latest humanoid platform, Atlas, positioning it as the next milestone in the company’s three‑decade quest to translate science‑fiction movement into practical automation. The narrative frames Atlas not merely as...

Introducing XGSynBot Humanoid Robot #ces2026
This video introduces the XGSynBot wheeled bi-arm mobile manipulator, announced this week at #CES2026.

Spatially-Enhanced Recurrent Memory for Long-Range Mapless Navigation
The video presents a new approach called Spatially‑Enhanced Recurrent Memory (SERM) designed to enable robots to navigate long distances without pre‑built maps. The authors describe how SERM augments a standard recurrent neural network with a spatial attention module that stores and...

AI on the Edge: YOLO Object Detection on Raspberry Pi with IP Cameras
The video walks viewers through extending the AI‑on‑the‑edge series by running the YOLO object‑detection model on a Raspberry Pi 5 while pulling video from an external IP camera. Paul emphasizes starting with a freshly flashed Debian Bookworm image because earlier releases lack full...

Humanoid Robots at Dubai’s Biggest Tech Expo
Dubai’s JITEC expo turned the city into a living laboratory, unveiling a spectrum of humanoid robots, AI‑driven rescue platforms and a bold national AI infrastructure plan. The centerpiece was Naira, a lifelike female robot built on Engineered Arts’ Ama platform,...

Intro to Hesai Maxwell & Hertz
In 2025, Hesai claims to have become the world's first lidar company to surpass 2 million cumulative lidar deliveries, enabling large-scale deployments across automotive and robotics applications amid rapidly growing global demand for advanced autonomy. To date, Hesai has secured design...
AI on the Edge: Watch This Before Buying a Raspberry Pi HAILO Accelerator
The video walks viewers through setting up AI on the edge using a Raspberry Pi 5, focusing on running YOLOv11 for object detection without any external accelerator. Paul McCarter explains why he chooses the 8 GB Pi 5 and a fresh...
I Built a Real Star Wars AT-AT
The video documents a maker’s ambitious project: constructing a life‑size, walkable Star Wars AT‑AT replica and testing it in real time. Using 3D‑printed plastic components, custom actuators, and a helmet‑mounted display, the creator demonstrates that the machine can stride, turn...